攻克軍工級驗證難題:健閔如何透過電子凸輪技術,實現無人機馬達自動化量產?
健閔(GMW Taiwan)在高功率密度馬達(如電動載具或高效能無人機)的開發中,設計端的「理論空間」常與生產端的「物理公差」產生衝突。本文探討如何透過自動化繞線控制技術,在不改動設計的前提下,利用電子凸輪與補償邏輯,化解粗線徑繞線的空間干涉難題。
無人機與高密度 BLDC 馬達的繞線瓶頸
✓ 關鍵技術:電子凸輪非線性連動控制。
✓ 實測成果:槽滿率從 75% 提升至 80%。
✓ 適用對象:馬達研發團隊、國防供應鏈、自動化設備採購。
馬達量產困境:為何手繞樣品無法複製到自動化產線?
研發與量產的核心矛盾
在全球無人機馬達與多股並繞無刷直流馬達製造需求激增的趨勢下,研發端的理論模型常在量產線遭遇物理挑戰。研發人員在初期依賴手繞樣品驗證性能,但進入馬達自動化製程階段後,卻面臨三大致命問題:
✓ 線圈排列不整齊 → 導致槽滿率下降 5-10%。
✓ 各相電阻不均 → 引起效率損耗與轉矩漣波。
✓ 張力控制不穩 → 漆包線絕緣層破裂。
台灣供應鏈的技術突圍關鍵
身為台灣專業的馬達定子繞線機供應商,健閔實業 (GMW Taiwan) 在實戰經驗中觀察到:解決量產瓶頸的關鍵不在於要求材料「零公差」,而在於如何利用電子凸輪系統的控制邏輯補償物理變數。
本文將從現場診斷、技術原理到實戰案例,完整剖析如何透過非線性連動技術擴大製程窗口,協助馬達研發團隊將產品從設計走向落地量產。
現場診斷|為什麼自動化繞線路徑會產生機構干涉?
問題根源:運動軌跡的剛性 vs. 材料的公差
自動化生產與手動打樣最大的區別在於運動軌跡的剛性要求。當材料本身的物理幾何出現波動時,原本預留的安全間隙會迅速消失,導致嚴重的機構干涉。以無人機無刷直流馬達應用為例:
定子鐵芯積厚誤差:0.1mm 的蝴蝶效應
應用在無人機的無刷直流馬達為了追求極限功率重量比,定子槽口空間被壓縮至極致。然而,馬達鐵芯在疊壓製程中,常因鋼片厚度正公差或壓力不均產生「積厚誤差」。僅 0.1mm 的累積誤差,在高速運行的飛叉繞線路徑上會造成嚴重負面影響。
"當飛叉繞線機以高速運行時,定子積厚細微的高度超標會導致繞線路徑偏離預期,使導線或繞線嘴與定子端部發生劇烈撞擊,這是研發轉量產時最常遇到的排線不穩定、或是傷線的主因。"
破解粗線徑剛性:非線性連動控制的物理邏輯
粗線徑繞線須克服高剛性與回彈特性等問題。根據電學公式,導線截面積越大,電阻越小,在高性能馬達中(如電動車或大功率無人機)為了降低發熱並承載極大電流,必須使用粗線徑。但銅線直徑一旦增加,其彎曲強度會呈幾何倍數上升,且回彈導致的層疊混亂是自動化排線的噩夢。
電子凸輪對應力回彈的補償機制
傳統繞線設備採用線性進給,難以應對粗銅線進入槽口後的彈復物理現象。電子凸輪控制的核心優勢在於能將排線軸與繞線主軸進行「非線性耦合」。
在導線彎折入槽的瞬間,控制系統會主動施加一個微秒級的路徑補償,抵銷線材的回彈應力。這種動態補償能強迫導線精準落位,解決粗線常見的「亂線」問題,確保每一匝線圈的物理結構穩定。
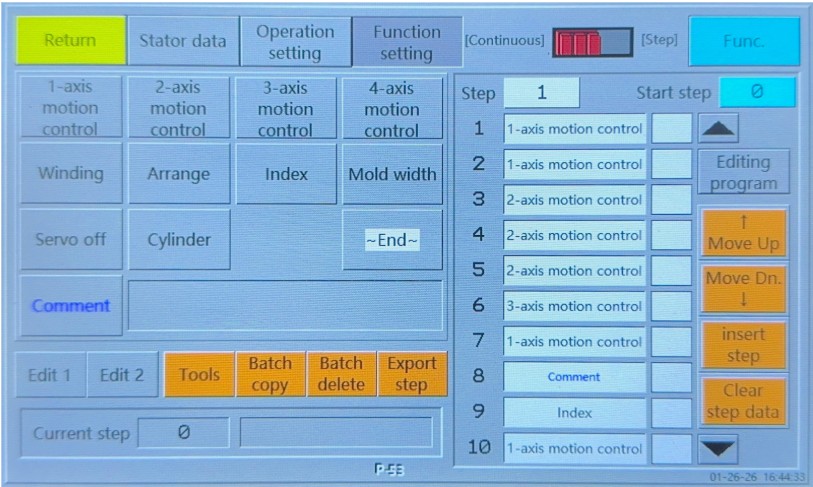
Human-Machine Interface (HMI) screen for configuring electronic cam (E-Cam) path compensation parameters.
提升馬達定子繞線槽滿率與排線整齊度的實戰應用
馬達定子線圈排線整齊不僅是為了美觀,更是為了確保三相繞組的電阻與電感對稱性,從而抑制轉矩漣波;同時,一致的排線結構能優化熱傳導路徑,達成理想的熱平衡狀態。
針對定子幾何非對稱性的「分段自定義編程」
高效能馬達為了避讓引線結構,定子內部空間呈現非對稱分佈。GMW馬達定子繞線機提供的 HMI 人機介面支援靈活「段落式編程」,以便工程師針對特定的圈數段落設定專屬軌跡。智慧化邏輯使自動化設備具備類似人工繞線的動態應變能力。
實現漆包線「零交錯、零堆疊」的高密度排列
透過非線性電子凸輪控制,能精準導引每一根導線的落點,實現蜂巢式緊密咬合結構。在實務應用中,這項技術能將槽滿率穩定提升至 80%,在極限空間內極大化導熱效率與轉矩密度。
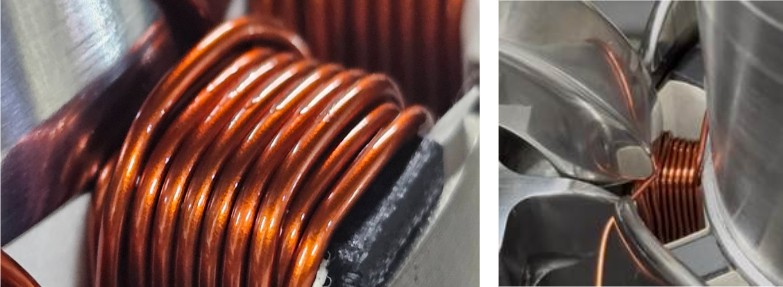
Close-up of perfectly aligned stator coil wires showing a tightly interlocked honeycomb structure for BLDC motors.
製程參數移植:縮短從研發到量產的轉化週期
自動化式樣服務對製程驗證的價值
研發端若能在初期導入自動化繞線設備進行試作,其意義在於將操作經驗具象化為可分析、可追蹤的量化數據。藉由數位化記錄的張力波動與補償軌跡,研發階段累積的參數具備了直接對接量產線的能力,減少重複調試週期。
技術分享:透過 DFM 優化提升馬達量產可行性
藉由實際的自動化繞線測試,技術團隊能提供 DFM 建議,例如微調極靴 R 角來優化導線滑入路徑。馬達從研發走向量產的成敗,取決於對物理公差的掌控。健閔協助研發端將不穩定的變數轉化為精確的參數,確保設計在現實生產中精準落地。