Vượt qua thử thách chứng nhận quân sự: Cách GMW sử dụng công nghệ E-Cam để sản xuất hàng loạt động cơ Drone
Vượt qua thử thách chứng nhận quân sự: Cách GMW sử dụng công nghệ E-Cam để sản xuất hàng loạt động cơ Drone
Trong quá trình phát triển động cơ mật độ năng lượng cao, "không gian lý thuyết" thường xung đột với "dung sai vật lý" khi sản xuất. Bài viết này khám phá cách công nghệ E-Cam giải quyết các thách thức can thiệp không gian của dây dẫn cỡ lớn mà không cần thay đổi thiết kế ban đầu.
Nút thắt trong quấn dây động cơ Drone và BLDC mật độ cao
✓ Công nghệ then chốt: Điều khiển liên kết phi tuyến E-Cam.
✓ Kết quả thực tế: Hệ số lấp đầy rãnh (Slot fill factor) tăng từ 75% lên 80%.
✓ Đối tượng: Đội ngũ R&D động cơ, chuỗi cung ứng quốc phòng.
Thế tiến thoái lưỡng nan: Tại sao mẫu quấn tay không thể sao chép lên dây chuyền tự động?
Mâu thuẫn giữa R&D và Sản xuất hàng loạt
Khi chuyển sang giai đoạn tự động hóa, các mẫu R&D thường đối mặt với 3 vấn đề chí tử:
✓ Sắp xếp cuộn dây không đều → Hệ số lấp đầy giảm 5-10%.
✓ Điện trở các pha không đều → Gây tổn thất hiệu suất và rung mô-men xoắn.
✓ Kiểm soát lực căng không ổn định → Làm rách lớp cách điện của dây đồng.
Chìa khóa đột phá từ GMW Taiwan
Chìa khóa không phải là yêu cầu vật liệu "không dung sai", mà là sử dụng logic điều khiển của hệ thống Cam điện tử (E-Cam) để bù đắp các biến số vật lý, giúp mở rộng cửa sổ quy trình cho sản xuất hàng loạt.
Chẩn đoán tại chỗ | Tại sao đường dẫn quấn dây tự động gây can thiệp cơ học?
Nguồn gốc vấn đề: Độ cứng quỹ đạo chuyển động vs. Dung sai vật liệu
Sự khác biệt lớn nhất giữa quấn tay và tự động là yêu cầu về độ cứng của quỹ đạo. Khi hình học vật liệu biến động, khoảng cách an toàn sẽ biến mất.
Lỗi chiều cao chồng thép Stator: Hiệu ứng cánh bướm 0.1mm
Sai số tích lũy chỉ 0.1mm trong quá trình ép Stator có thể gây ra tác động tiêu cực nghiêm trọng khi máy quấn flyer chạy tốc độ cao.
"Khi chạy tốc độ cao, chỉ một chút vượt mức chiều cao Stator sẽ khiến đường dẫn quấn dây bị chệch, gây va chạm mạnh giữa vòi quấn và Stator. Đây là nguyên nhân chính gây đứt dây khi sản xuất hàng loạt."
Vượt qua độ cứng dây cỡ lớn: Logic vật lý của điều khiển phi tuyến
Dây đồng càng lớn, lực đàn hồi (springback) càng mạnh, gây ra hiện tượng quấn dây lộn xộn. Ưu thế của E-Cam là tạo ra sự "liên kết phi tuyến" giữa trục cấp dây và trục quấn chính.
Cơ chế bù đắp ứng suất đàn hồi của E-Cam
Tại thời điểm dây uốn vào rãnh, hệ thống chủ động bù đắp quỹ đạo ở mức micro giây để triệt tiêu lực đàn hồi, buộc dây vào đúng vị trí chính xác.
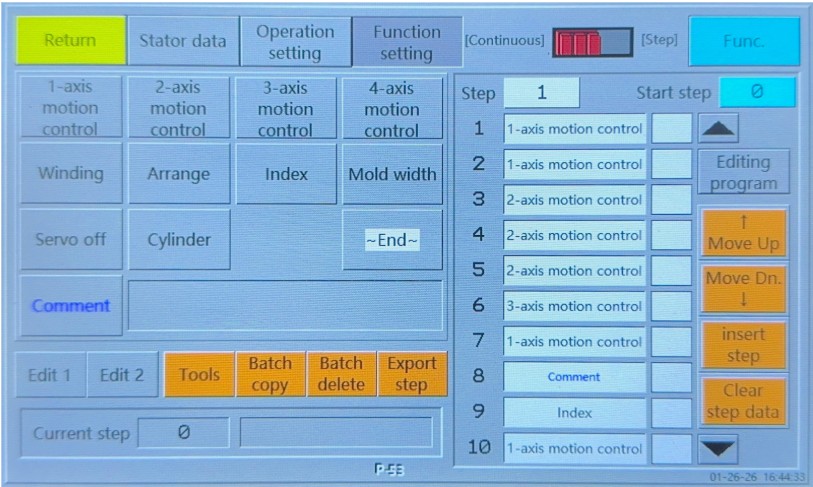
Giao diện HMI cấu hình thông số bù đắp quỹ đạo E-Cam.
Ứng dụng thực tế trong việc cải thiện hệ số lấp đầy rãnh Stator
Việc sắp xếp dây gọn gàng đảm bảo tính đối xứng của điện trở và điện cảm giữa 3 pha, giúp giảm thiểu rung động mô-men xoắn và tối ưu hóa tản nhiệt.
Lập trình phân đoạn cho hình học Stator không đối xứng
HMI của GMW hỗ trợ lập trình linh hoạt theo từng phân đoạn vòng quấn, cho phép thiết lập quỹ đạo và lực căng riêng cho các vòng cụ thể (ví dụ vòng 5-10).
Đạt được cấu trúc quấn dây "Không giao chéo, Không chồng lấp"
Công nghệ này giúp tăng hệ số lấp đầy lên 80% một cách ổn định, tối đa hóa mật độ mô-men xoắn trong không gian cực hạn.
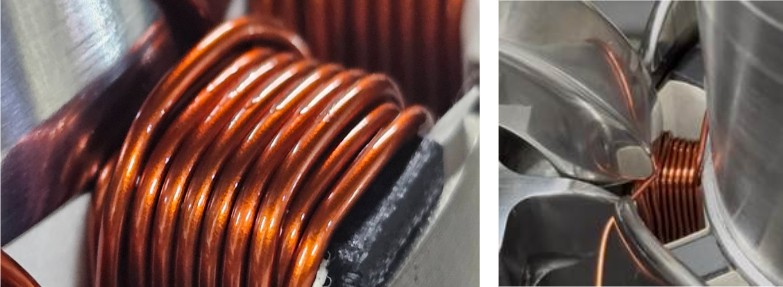
Cận cảnh các vòng dây Stator được sắp xếp hoàn hảo.
Rút ngắn chu kỳ từ R&D đến Sản xuất hàng loạt
Thành công của việc đưa động cơ từ thiết kế ra thị trường phụ thuộc vào khả năng kiểm soát dung sai vật lý. GMW giúp chuyển đổi các biến số không ổn định thành các tham số điều khiển chính xác.